|

|
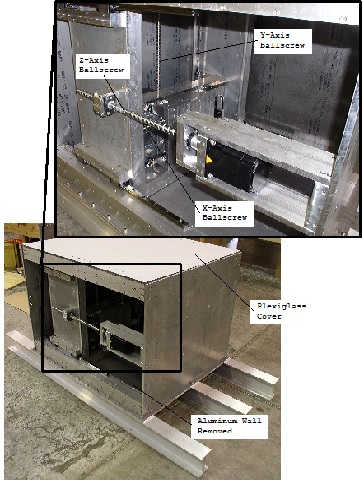
Figure 1. Manipulator/Machining Center (M/MC) Figure 2. Drive Electronics for Our M/MC
NASA has many needs for maintenance and repair technologies for long-duration human space missions. Under a Phase II SBIR contract for NASA, we are developed a compact, portable, vacuum-compatible, multi-axis Manipulator/Machining Center (M/MC) to satisfy many of NASA’s needs (see Figures 1 and 2 above). Our M/MC moves a milling head through three axes of linear motion (x-axis, y-axis, and z-axis). Servomotor driven ball-screw linear actuators drive the milling head along linear guideways. The eventual M/MC system that NASA uses for space missions might include a high-speed (for example, 100 kRPM) spindle that uses hydrostatic bearings. In Phase I, we generated a preliminary design of our M/MC; projected the machining performance, mass, volume, and power consumption of our M/MC; and showed how our M/MC can be integrated with layer-additive equipment. In Phase II, we designed-in-detail, built, and tested a prototype M/MC.
NASA has many needs for maintenance and repair technologies for long-duration human space missions. Under a Phase II SBIR contract for NASA, we are developed a compact, portable, vacuum-compatible, multi-axis Manipulator/Machining Center (M/MC) to satisfy many of NASA’s needs (see Figures 1 and 2 above). Our M/MC moves a milling head through three axes of linear motion (x-axis, y-axis, and z-axis). Servomotor driven ball-screw linear actuators drive the milling head along linear guideways. The eventual M/MC system that NASA uses for space missions might include a high-speed (for example, 100 kRPM) spindle that uses hydrostatic bearings. In Phase I, we generated a preliminary design of our M/MC; projected the machining performance, mass, volume, and power consumption of our M/MC; and showed how our M/MC can be integrated with layer-additive equipment. In Phase II, we designed-in-detail, built, and tested a prototype M/MC.